在动态系统状态估计与目标跟踪领域,高精度 、高鲁棒性的状态感知是机器人导航、自动驾驶、工业控制、目标检测 等场景的核心需求。传统滤波方法(如扩展卡尔曼滤波EKF)依赖线性化近似,易在强非线性系统中引入误差;而单一深度学习 模型虽能拟合复杂非线性关系,却缺乏严谨的概率不确定性建模与递归更新能力。卷积神经网络 (CNN)与无迹卡尔曼滤波(UKF)的融合 ,恰好能实现二者优势互补:CNN凭借局部连接与权值共享的特性,高效提取高维数据(图像、时序特征 图、多传感器序列)的深层时空关联;UKF通过无迹变换(UT)近似非线性系统的概率分布 ,规避EKF线性化误差,实现高精度 递归状态估计与不确定性量化。
本文将系统拆解CNN与UKF融合的核心原理、主流实现架构、典型应用场景与关键技术要点,兼顾理论深度与实操价值,助力读者全面掌握这一前沿技术体系。
一、核心基础:CNN与UKF的互补性与适配性 1.1 卷积神经网络 (CNN):高维特征 提取的核心引擎 CNN是专为处理网格结构数据(图像、时序特征 图、传感器阵列数据)设计的深度学习 架构,核心组件包括卷积层、池化层、批归一化层与全连接层。其核心优势在于:
局部特征 提取 :通过卷积核滑动捕获数据的局部时空关联(如图像的边缘、纹理,时序信号的局部波动),避免高维数据维度灾难;
权值共享 :大幅减少模型参数,提升训练效率与泛化能力 ;
多尺度特征 融合 :通过池化层与跳跃连接,实现从底层细节到高层语义的特征 提取,适配复杂场景下的特征 建模需求。
1.2 无迹卡尔曼滤波(UKF):非线性状态估计的最优解 UKF是针对非线性系统的递归滤波算法,核心通过无迹变换 选取一组确定性采样点(Sigma点),通过非线性函数传播后统计均值与协 方差 ,避免EKF的雅可比矩阵计算与线性化误差,显著提升非线性系统的估计精度 。其核心流程包括:
时间更新 :通过系统非线性模型传播Sigma点,预测状态与误差协 方差 ;
量测更新 :融合观测数据,计算卡尔曼增益,修正预测状态与协 方差 。
UKF的核心价值在于严谨的不确定性建模 与递归更新能力 ,但对复杂非线性关系的拟合依赖精准的系统模型,难以应对模型失配或噪声突变场景。
1.3 融合的核心逻辑:扬长避短,构建“特征 提取+概率估计 ”闭环 CNN与UKF的融合,本质是用CNN弥补UKF的模型依赖缺陷,用UKF约束CNN的过拟合 与不确定性缺失 ,形成“数据驱动特征 提取+统计滤波递归优化”的闭环。具体互补关系如下表所示:
模块
核心优势
固有局限
融合价值
CNN
自动提取高维数据深层时空特征 ,无需人工特征 工程
缺乏不确定性量化,易过拟合 ,泛化性依赖大量标注数据
为UKF提供精准、高维的特征 输入,替代手工特征 建模
UKF
非线性状态估计精度 高,不确定性量化严谨,递归更新稳定
依赖精准系统模型,对模型失配、噪声突变敏感
约束CNN输出的合理性,平滑估计轨迹,提升鲁棒性
二、主流融合架构:从前端特征 到后端优化的三种核心范式 根据CNN与UKF的交互方式,可将融合架构分为三类,覆盖不同场景的技术需求,以下结合文献案例详解各架构的原理、实现与适用场景。
2.1 前端特征 融合架构:CNN→UKF特征 输入(最常用) 核心原理 CNN作为前端特征 提取模块 ,对原始高维数据(如图像、多传感器时序特征 图、雷达距离-多普勒谱)进行特征 学习与降维 ,输出低维、高区分度的特征 向量,作为UKF的量测输入 或状态变量 ,实现UKF的高精度 估计。
典型流程
原始数据预处理 (如图像归一化、雷达信号去噪、时序序列切片);
CNN特征 提取:通过卷积层、池化层提取深层特征 ,经全连接层输出维度适配UKF的特征 向量(如目标位置、速度、姿态等状态量);
UKF状态估计:将CNN输出的特征 作为UKF量测值,结合系统动力学模型,完成时间更新与量测更新,输出最优状态估计。
适用场景与案例
机器人视觉导航 :单目相机采集目标图像,CNN提取目标的位置、姿态特征 ,UKF融合IMU数据,实现目标位姿的高精度 跟踪;
毫米波雷达手势识别 :CNN提取手势的距离-多普勒特征 谱,UKF抑制干扰噪声,提升手势识别准确率 (文献验证:识别准确率 达98.74%,较无滤波提升7.29%);
重载AGV质心侧偏角估计 :CNN提取传感器时序特征 ,生成“伪质心侧偏角”作为UKF观测值,修正动力学模型估计,提升AGV运动稳定性。
2.2 后端优化融合架构:CNN→UKF参数/模型修正 核心原理 UKF作为核心状态估计模块 ,CNN作为后端优化模块 ,用于修正UKF的关键参数或系统模型,解决UKF对噪声统计特性、模型失配敏感的问题。
典型流程
UKF基础估计:通过系统模型与原始观测数据,完成初步状态估计;
CNN参数修正:CNN学习历史估计误差、噪声特征 ,动态调整UKF的过程噪声协 方差 (Q) 、**量测噪声协 方差 (R)**或卡尔曼增益,适配不同场景的噪声变化;
二次优化估计:用修正后的参数重新执行UKF的量测更新,输出更精准的状态估计。
适用场景与案例
车辆组合导航 :CNN识别车辆运动状态(加速、减速、转弯),动态调整UKF的噪声协 方差 ,解决固定噪声难以适配不同运动行为的问题,位置误差下降22.67%;
锂电池荷电状态(SOC)估计 :云端CNN-LSTM 模型学习SOC估计误差,终端UKF融合云侧与侧估计结果,提升SOC估计精度 与鲁棒性。
2.3 双向迭代融合架构:CNN与UKF协同优化 核心原理 CNN与UKF形成双向反馈闭环 :CNN输出的特征 用于UKF估计,UKF的估计结果与不确定性反馈至CNN,用于模型微调或特征 重提取,进一步提升特征 质量与估计精度 。
典型流程
初始特征 提取与UKF估计:CNN提取原始特征 ,UKF完成首次状态估计;
反馈优化:UKF输出的估计残差、不确定性量化结果,作为CNN的监督信号,微调网络参数或优化特征 提取策略;
迭代更新:重复“CNN特征 提取→UKF估计→反馈优化”过程,直至估计精度 收敛。
适用场景与案例
非合作航天器姿态跟踪 :CNN从单目图像提取目标姿态,UKF融合轨道与姿态信息,航天器姿态估计的鲁棒性与精度 显著提升;
仿生机器狗定位 :CNN提取视觉动态局部特征 ,UKF融合腿-惯性里程计数据,定位误差下降22.3%,单帧处理时间缩短15.8%。
三、关键技术要点:从数据准备到工程落地的全流程 3.1 数据预处理 :适配融合架构的核心前提
特征 对齐特征 维度与UKF的状态维度一致(如UKF状态为[位置x, 位置y, 速度vx, 速度vy],CNN输出需为4维向量);
噪声增强 :训练阶段加入高斯噪声、椒盐噪声等,提升CNN与UKF的抗干扰能力。
3.2 CNN模型设计:轻量化与精度 的平衡
特征 维度适配
3.3 UKF参数配置:适配融合架构的关键
Sigma点选择 :根据系统状态维度选择合适的Sigma点数量(通常为2n+1,n为状态维度),平衡估计精度 与计算复杂度;
噪声协 方差 初始化 :初始Q、R可通过经验设定或从训练数据中统计得到,前端特征 融合架构中,R可根据CNN输出特征 的噪声特性动态设定;
系统模型构建 :前端特征 融合架构需精准的动力学模型(如AGV运动模型、车辆运动模型),后端优化架构可通过CNN学习近似系统模型。
3.4 工程实现:开源框架与代码核心逻辑 核心工具链
UKF实现 :NumPy手动实现(轻量灵活)、FilterPy(开源滤波库,支持自定义噪声协 方差 );
融合部署 :ONNX 、TensorRT(实现CNN与UKF的端到端部署,提升推理速度)。
核心代码逻辑(Python,前端特征 融合) import numpy as npimport torchimport torch.nn as nnfrom filterpy.kalman import UnscentedKalmanFilter as UKFfrom filterpy.kalman import MerweScaledSigmaPointsclass CNNFeatureExtractor (nn.Module) :def __init__ (self, input_channels=3 , output_dim=4 ) :32 , kernel_size=3 , padding=1 )2 )32 , 64 , kernel_size=3 , padding=1 )2 )64 * 16 * 16 , output_dim) def forward (self, x) :1 )return self.fc(x)def fx (state, dt) :return np.array([x + vx*dt, y + vy*dt, vx, vy]) def hx (state) :return np.array([x, y]) 4 0.1 , beta=2. , kappa=0 )2 , dt=0.1 , fx=fx, hx=hx, points=sigma_points)0. , 0. , 1. , 0. ]) 0.1 0.01 2 ) * 0.1 "cuda" if torch.cuda.is_available() else "cpu" )"cnn_feature_extractor.pth" ))def fusion_inference (image) :numpy (image).permute(2 , 0 , 1 ).unsqueeze(0 ).float().to(device) / 255.0 with torch.no_grad():numpy ()[0 ] 2 ]) return ukf.x, ukf.P 3.5 性能评估指标:量化融合效果
鲁棒性指标 :不同噪声强度下的误差变化率、抗干扰能力(如干扰下的误差收敛速度);
实时性指标 :单帧推理时间(CNN推理+UKF更新)、帧率——适配实时系统需求。
四、典型应用场景:从实验室到工业界的落地实践 4.1 机器人领域:导航与控制的核心支撑
视觉导航 :CNN提取环境特征 (如路标、障碍物位置),UKF融合激光雷达、IMU数据,实现机器人在复杂环境中的高精度 定位与路径规划;
机械臂控制 :CNN提取机械臂末端执行器的位姿特征 ,UKF抑制传感器噪声与模型误差,提升机械臂操作精度 。
4.2 自动驾驶:多传感器融合的关键技术
目标跟踪 :CNN从相机图像提取车辆、行人的位置、速度特征 ,UKF融合毫米波雷达、激光雷达数据,实现多目标的稳定跟踪,规避遮挡、噪声干扰;
车辆状态估计 :CNN识别车辆运动状态,动态调整UKF噪声协 方差 ,提升车速、质心侧偏角的估计精度 ,支撑自动驾驶的稳定性控制。
4.3 工业与物联网:设备状态监测
工业机器人故障诊断 :CNN提取电机振动、电流的时序特征 ,UKF平滑特征 曲线,精准识别设备异常状态,实现预测性维护;
无人机姿态估计 :CNN从单目图像提取无人机姿态,UKF融合陀螺仪、加速度计数据,提升姿态估计的稳定性与精度 。
手势识别 :CNN提取毫米波雷达的距离-多普勒特征 ,UKF抑制类目标干扰,提升手势识别准确率 ;
图像分割 :U-Net (CNN变体)与UKF融合,优化分割结果的边缘平滑性,提升医学影像、遥感图像的分割精度 。
五、挑战与未来方向:突破瓶颈,拓展应用边界 5.1 当前核心挑战
计算复杂度 :CNN与UKF的融合增加推理开销,实时性要求高的场景(如自动驾驶)需进一步轻量化;
模型泛化性 :CNN易受场景变化影响,UKF对系统模型依赖度高,二者融合的泛化能力 有待提升;
不确定性量化 :如何将CNN的特征 不确定性与UKF的概率估计 深度融合,提升系统的可靠性。
5.2 未来发展方向
轻量化融合架构 :结合知识蒸馏、模型压缩 技术,设计轻量CNN与高效UKF融合方案,适配边缘设备;
自适应融合机制 :引入强化学习 、注意力机制,动态调整CNN与UKF的交互权重,适配不同场景的噪声与模型变化;
多模态融合 :拓展至多模态数据(图像+雷达+IMU)融合,提升复杂系统的感知能力;
理论体系完善 :建立CNN-UKF融合的统一数学框架,提升方法的理论严谨性。
六、总结 CNN与无迹卡尔曼滤波的融合,是动态系统状态估计领域的重要技术突破,通过“数据驱动特征 提取+统计滤波递归优化”的闭环设计,既解决了传统滤波方法的线性化误差与模型依赖问题,又弥补了单一深度学习 模型的不确定性缺失与泛化性不足
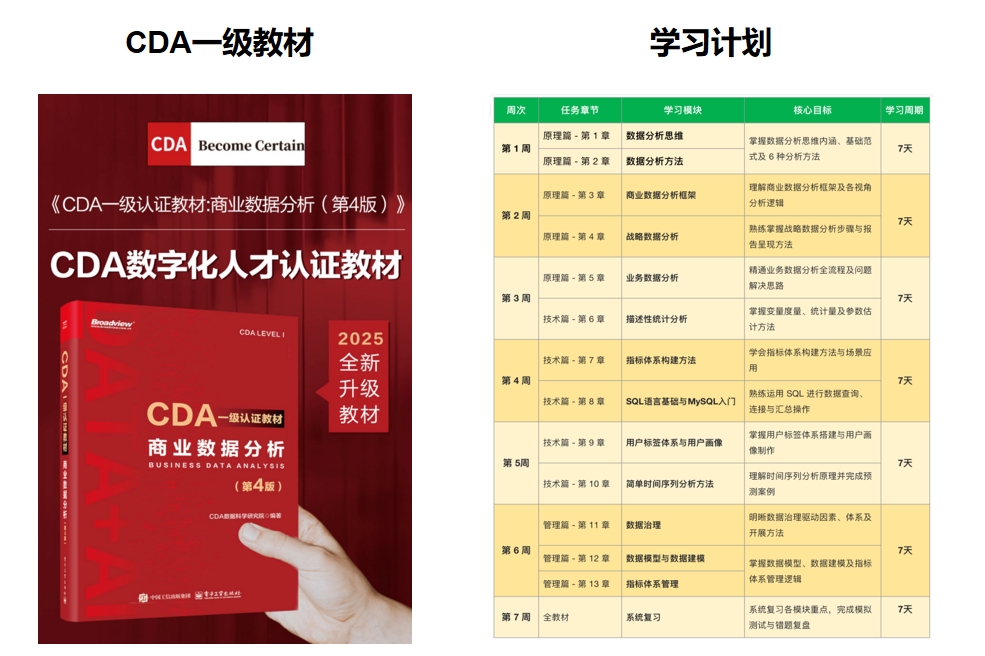
推荐学习书籍 《CDA一级教材 》适合CDA一级考生备考,也适合业务及数据分析岗位的从业者提升自我。完整电子版已上线CDA网校,累计已有10万+在读~ !
CDA数据分析师考试相关入口一览(建议收藏):
▷ 想报名CDA认证考试,点击>>>
“CDA报名 ”
了解CDA考试详情;
▷ 想学习CDA考试教材,点击>>> “CDA教材”
▷ 想加入 CDA考试题库 ,点击>>> “CDA 题库 ” 了解CDA考试题库;
▷ 想了解CDA 考试 含金量 ,点击>>> “CDA含金量”
▷ 想了解CDA 院校合作 ,点击>>> “院校合作”











 京公网安备 11010802034615号
经营许可证编号:京B2-20210330
京公网安备 11010802034615号
经营许可证编号:京B2-20210330